
Ein Vorteil der elektronischen Boot Navigation ist ja, dass man so schön Routen planen kann: Ein paar Klicks um Wegpunkte zu erstellen und schon kann es losgehen, wie bei dem Sprung von Marstal nach Ærøskøbing oben.
Aber: Ist die Route auch sicher? Sind irgendwo Untiefen, Tonnen oder sonstige Hindernisse, denen ich zu nahe komme?
Hier die Route noch mal genauer. Ich habe eine Abkürzung gewählt, wo das Wasser tief genug sein sollte:
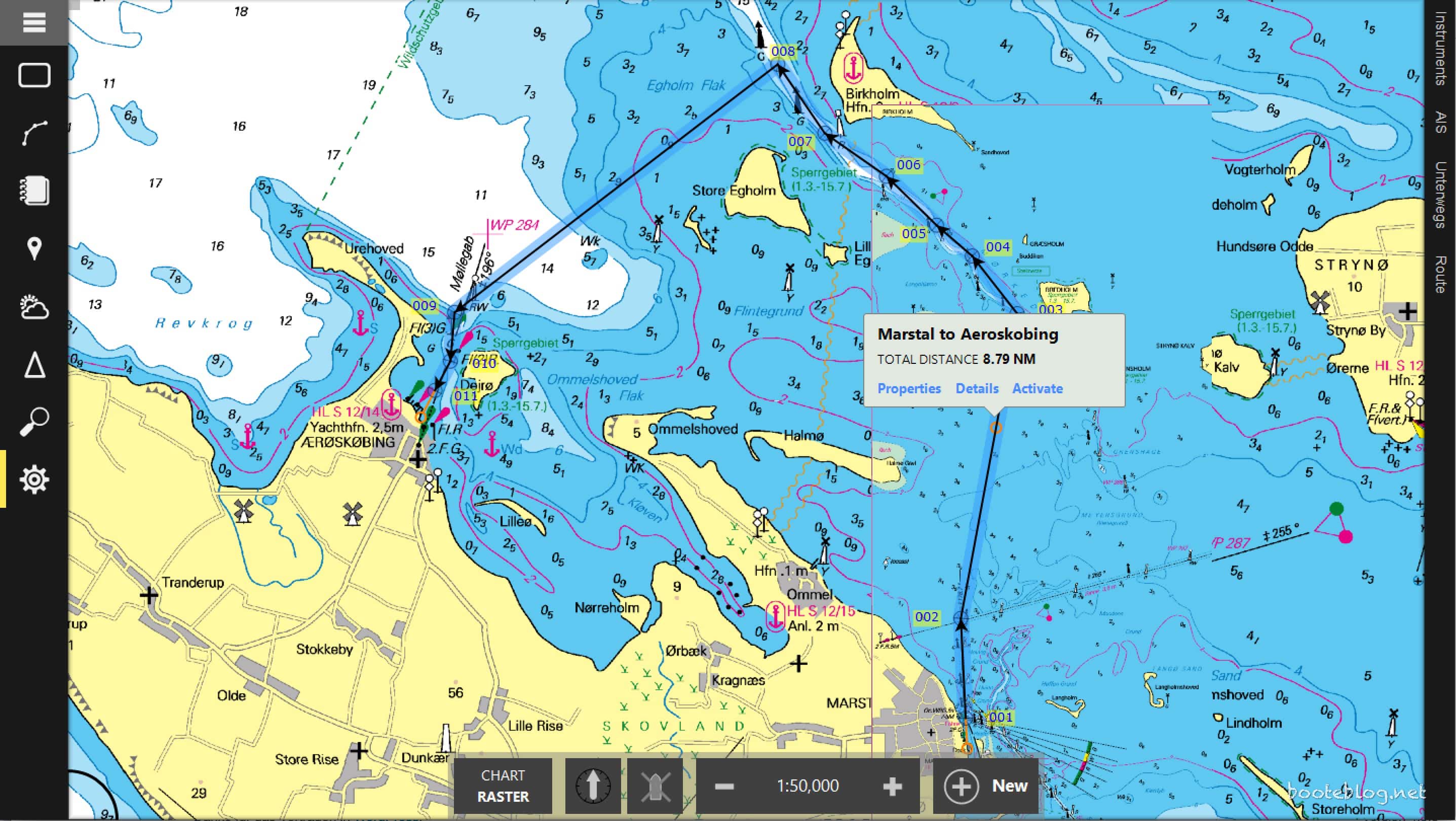
Sieht also gut aus soweit, oder?
Automatische Prüfung auf Untiefen und Hindernisse bei der Boot Navigation
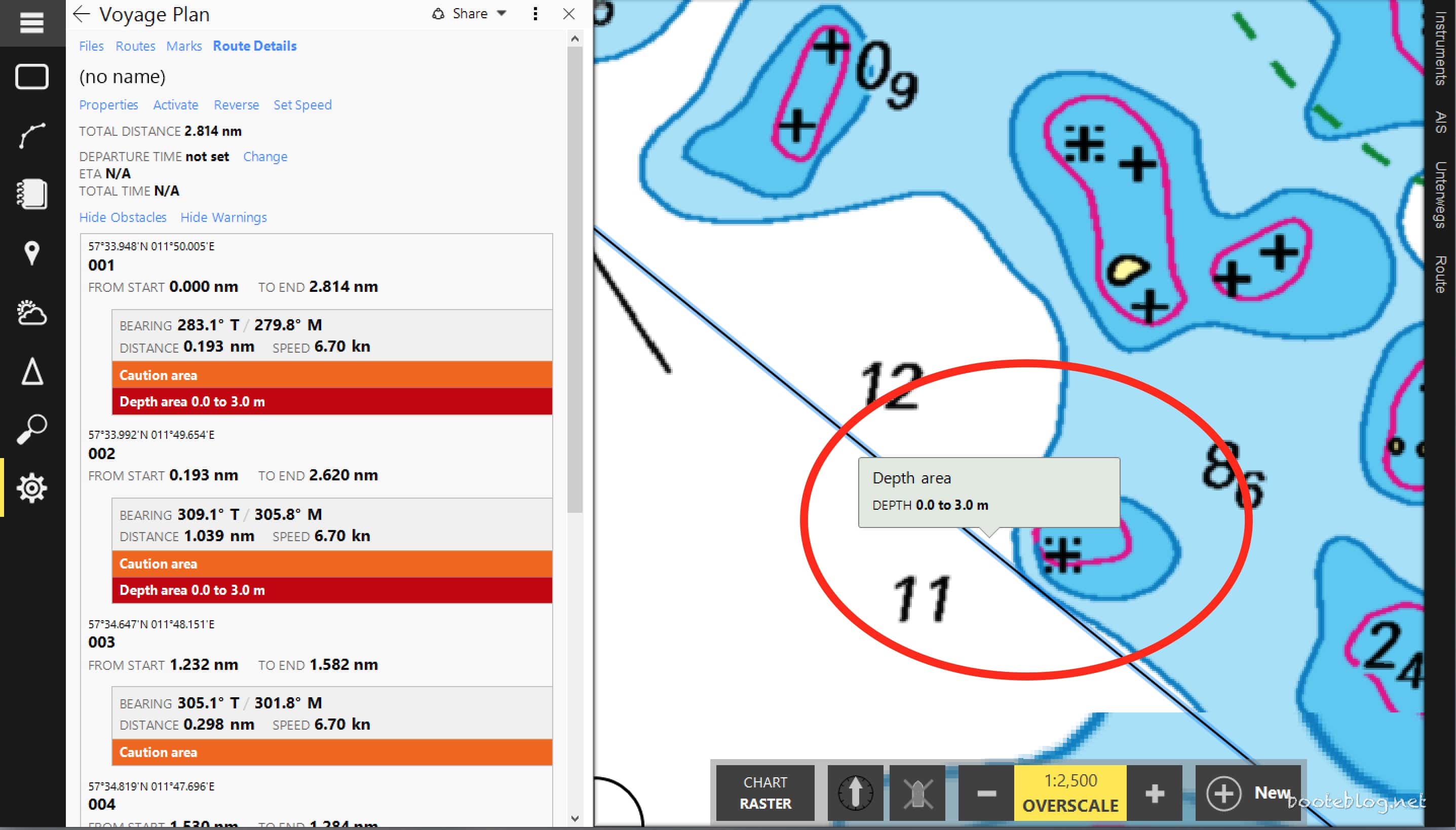
Coastal Explorer, mein Navigationsprogramm, hat da allerdings ein Problem gefunden (roter Kreis von mir):
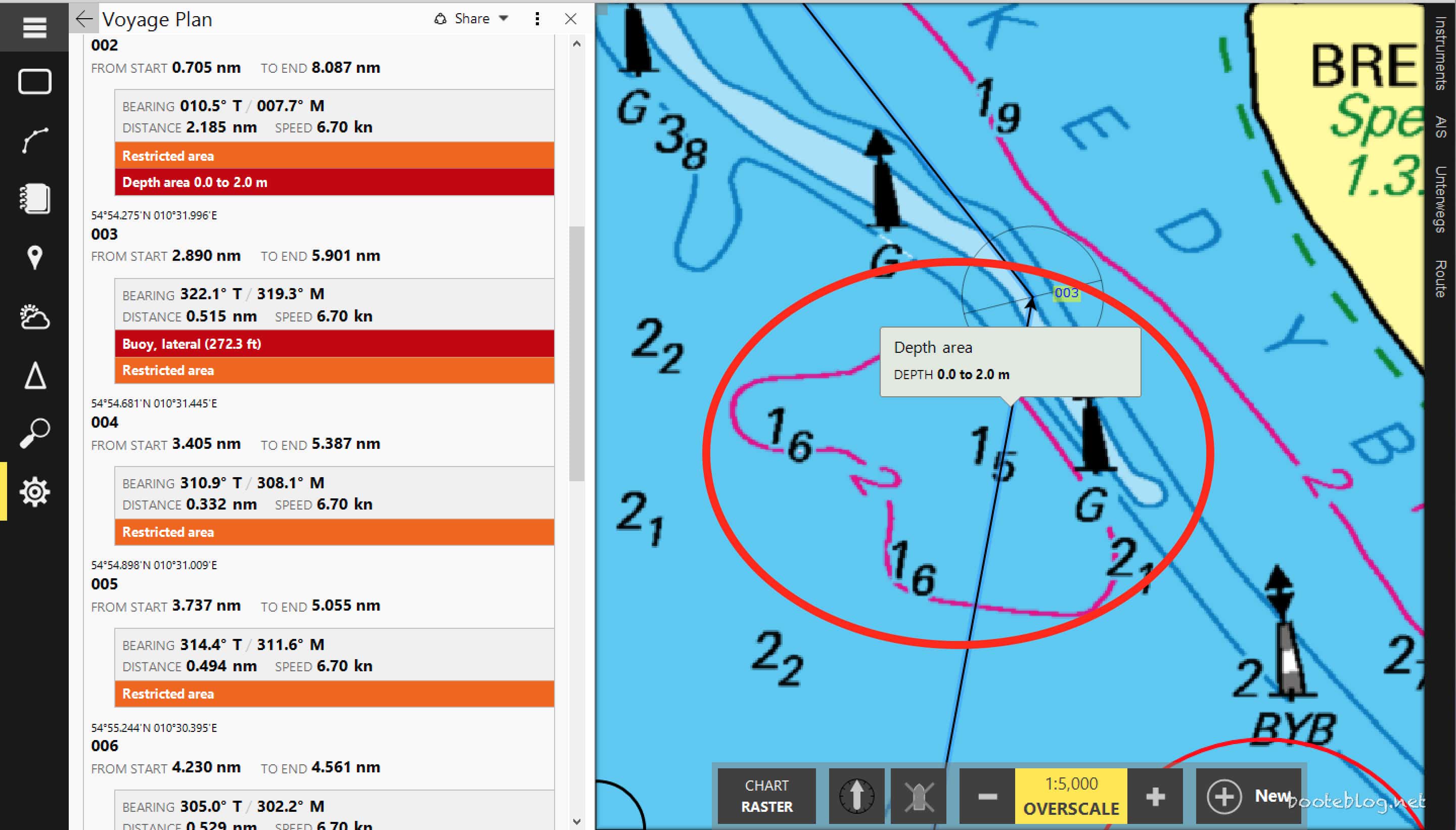
Oha, da habe ich wohl nicht genau genug hingeguckt! Meine Route führt über eine kleine Untiefe, wo es mit 1,5m schon sehr knapp für unsere JULIUS mit einem Tiefgang von eben genau 1,5m werden kann.
Auf dem Foto links sind die einzelnen Wegpunkte zu sehen, und auf dem Weg vom Punkt 002 zu 003 zeigt Coastal Explorer eine rote Warnung „Depth area 0.0. to 2.0m“ an – genau bei dieser Untiefe. Aber wie macht Coastal Explorer das?
Automatische Prüfung auf Hindernisse: Nur mit Vektor-Karten
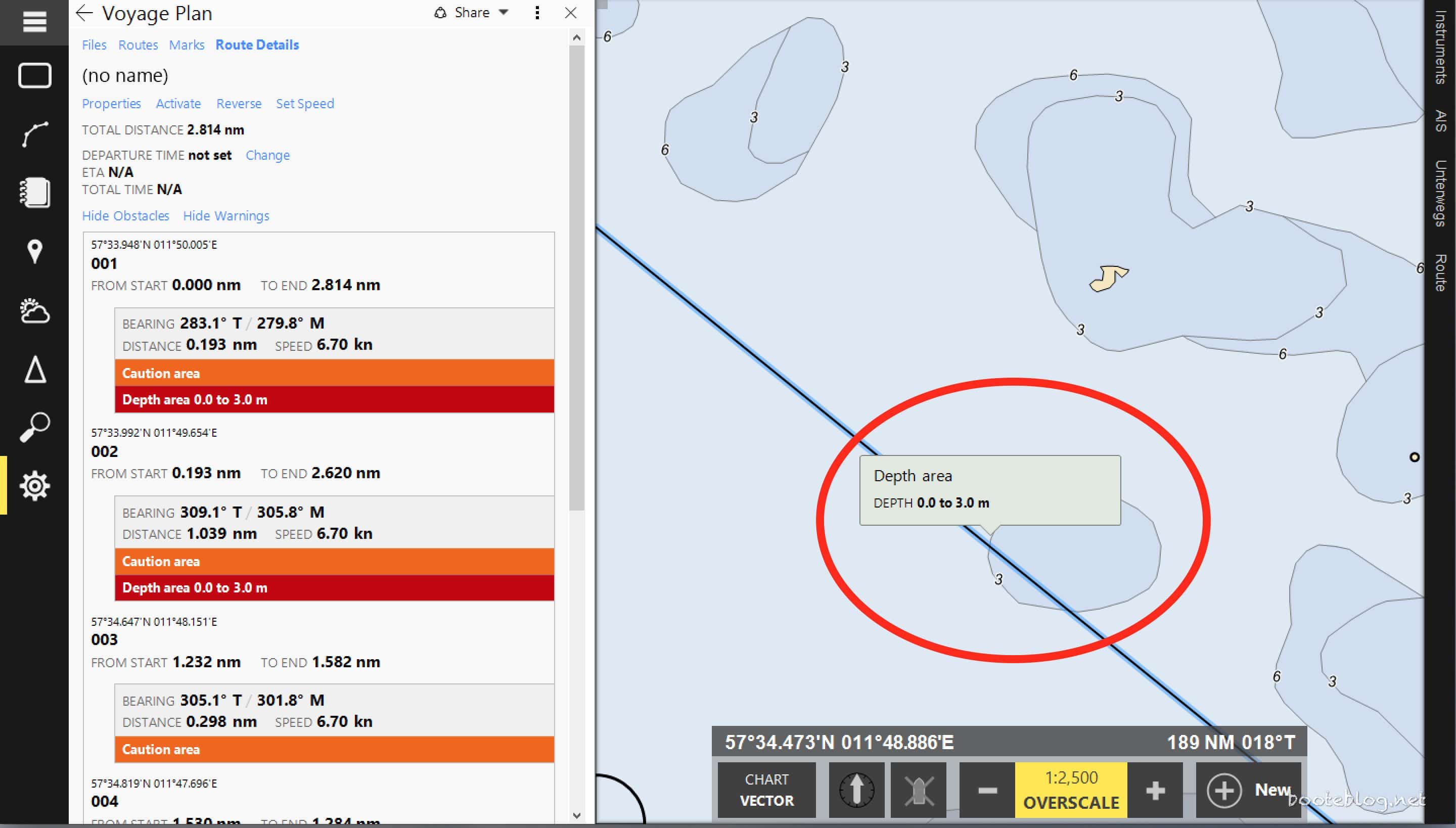
Zusätzlich zu den sehr guten NV Charts Karten habe ich auch Vektor-Karten von Chartworld in Coastal Explorer eingespielt. In der Vektor-Karte sieht die gleiche Stelle so aus (roter Kreis wieder von mir):

Einer der großen Vorteile von Coastal Explorer ist dessen Fähigkeit, gleichzeitig mit mehreren Kartenformaten arbeiten zu können. Ich habe NV Charts, Vektor-Karten (offzielle ENCs) von Chartworld und C-MAP Karten installiert (wobei ich C-MAP am schlechtesten finde und die auch schon veraltet ist).
Die Karten von NV Charts sind sogenannte Raster-Karten. Die sehen exakt so aus wie auf Papier und sind von Kartografen bewusst gestaltet, so dass sie gut lesbar sind und möglichst viele Informationen enthalten. Der Nachteil der Raster-Karten: Alle Informationen können nicht nicht automatisiert für die Boot Navigation verarbeitet werden.
Vektor-Karten dagegen sehen nicht so schön aus, enthalten aber alle Informationen in einer Form, die vom Computer verarbeitet werden kann. Coastal Explorer habe ich mitgeteilt, welchen Tiefgang die JULIUS hat – und daher kann Coastal Explorer meine Route entlanggehen und prüfen, ob es überall tief genug ist.
Es wird nicht nur auf Untiefen geprüft
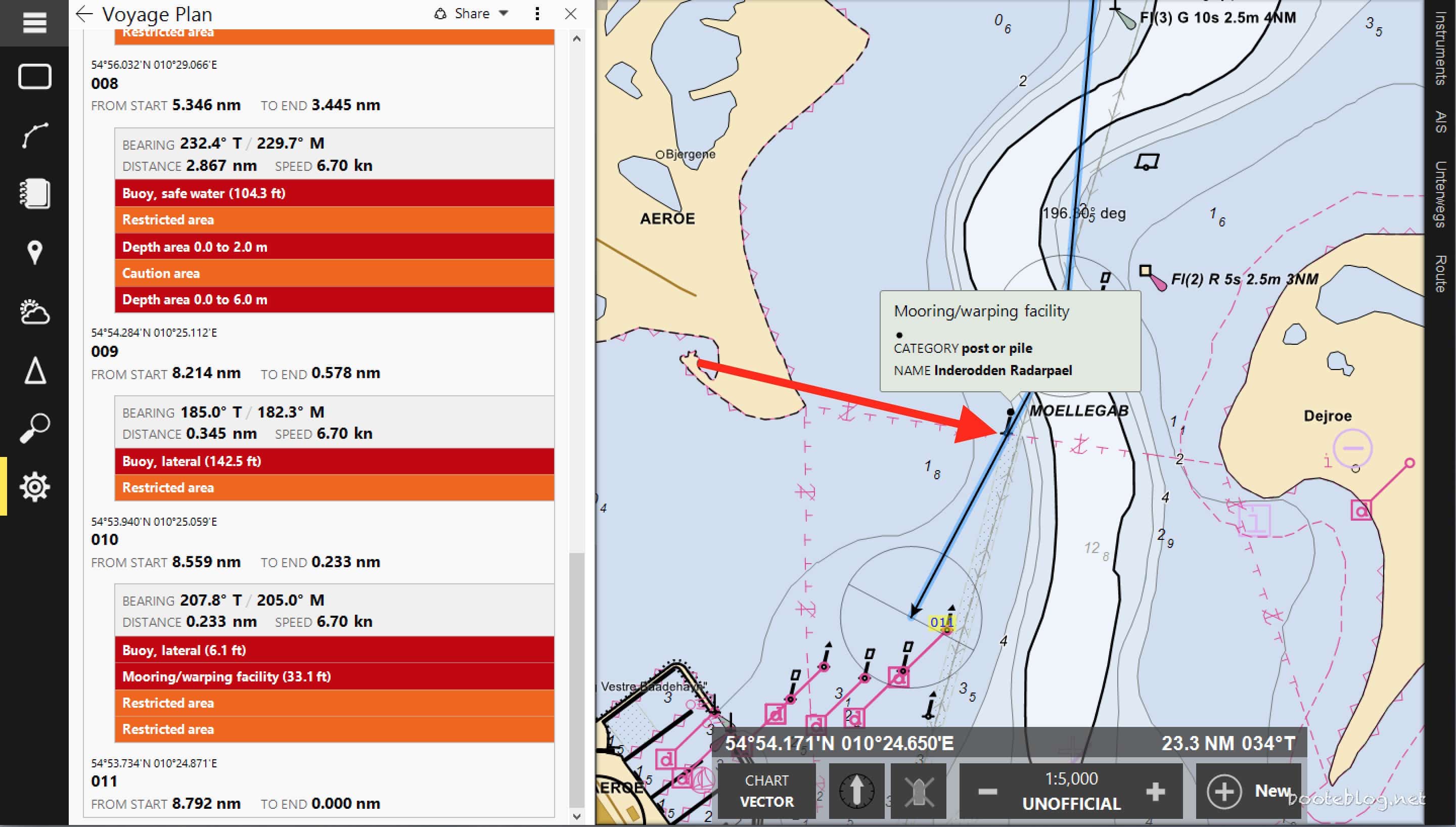
Diese automatische Prüfung auf Hindernisse (in englisch nennt sich das „Obstacle Detection“) guckt nicht nur auf Untiefen, sondern auch auf Tonnen, Brückenpfeiler, die Höhe von Brücken und was sonst noch an Hindernissen vorkommen kann.
So gibt es kurz vor Ærøskøbing noch ein anderes mögliches Hindernis (roter Pfeil von mir):
Hindernisse, die bei schlechter Sicht zum Problem werden könnten
Da liegt eine Tonne direkt auf der Route. Bei guter Sicht ist das natürlich einfach, dann sehe ich die Tonne ja und fahre ohnehin drumherum. Aber was, wenn gerade Starkregen eingesetzt hat und die Sicht fast Null ist? Dann halte ich mich eng an die Route, die mich in diesem Falle also direkt zur Kollision mit der Tonne führen würde.
Sehr praktisch ist diese automatische Prüfung auf Hindernisse bei der Boot Navigation auch in den Schären. Hier mal eine Route von Fjordholmen nach Donsö:
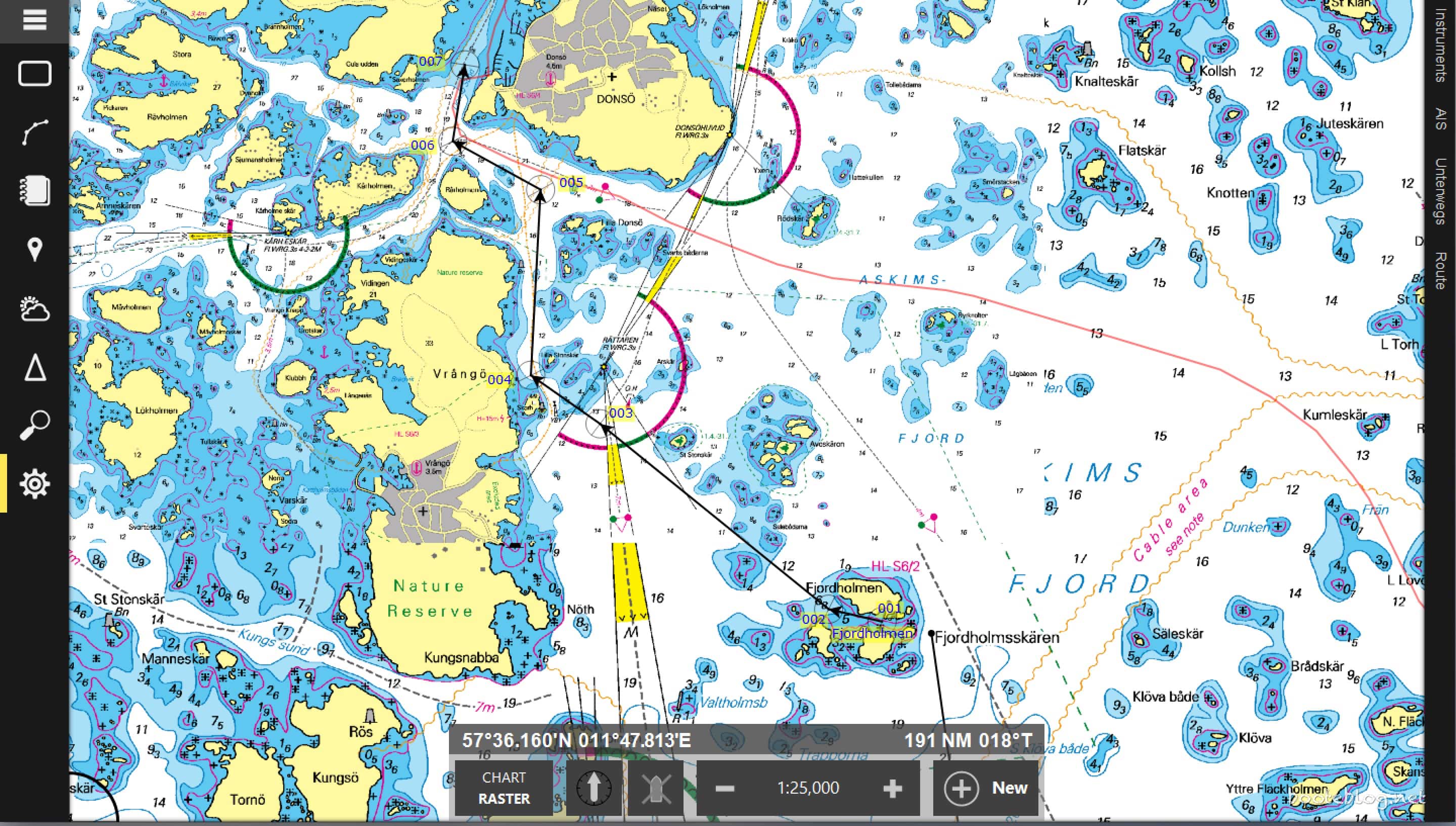
Das geübte Auge sieht vermutlich gleich, wo es knallen könnte:
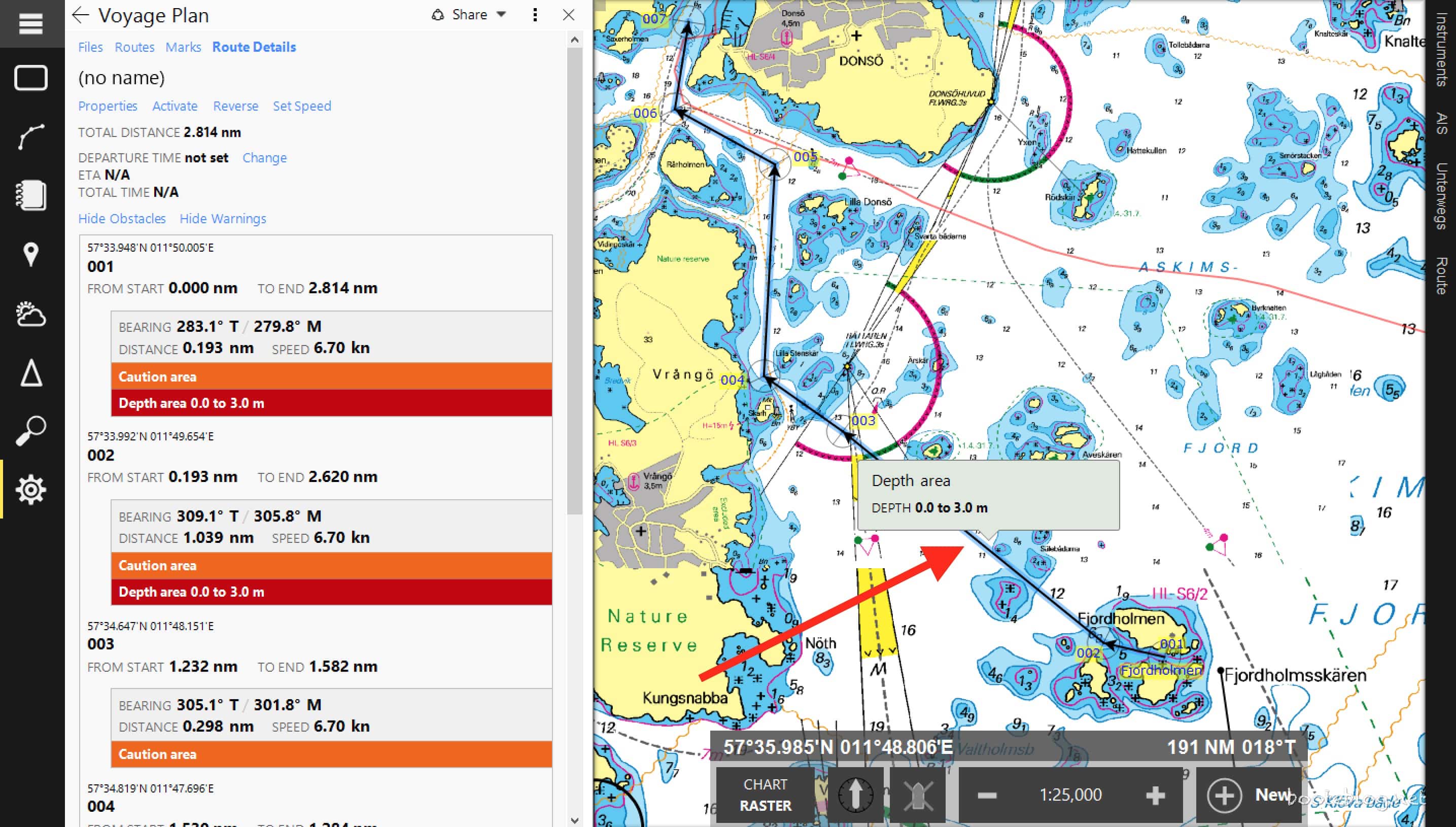
Der Weg führt direkt durch zwei unter Wasser liegenden Felsen und dann sehr nah eine einem weiteren Felsen entlang. Viel zu eng, für meinen Geschmack.
Hier noch mal die gleiche Stelle in der Vektor-Karte:
Schön zu sehen ist hier übrigens, dass Karten von zwei verschiedenen Herstellern in Details auch mal unterschiedlich sein können!
Ein Felsen: In einer Karte eingezeichnet, in der anderen nicht
NV Charts hat den Felsen klar eingezeichnet, in der Vektor-Karte (die immerhin eine offizielle ENC ist, also direkt vom entsprechenden Amt in Schweden herausgegeben!) sieht es so aus, als ob es da 3 Meter tief wäre.
Gerade in den Schären mit einer Zilliarde Felsen, die mal eben unter Wasser liegen, ist so eine automatische Prüfung auf Hindernisse bei der Boot Navigation schon sehr praktisch.
Was ist nötig für die automatische Prüfung auf Hindernisse?
Damit ein Navigationssystem automatisch auf Hindernisse prüfen kann, ist eine entsprechende Vektor-Karte Voraussetzung – denn der Computer muss die Informationen der Karte ja verarbeiten können.
Unter den PC basierten Navigationsprogrammen weiß ich nur von Coastal Explorer, dass diese Hindernisprüfung vorhanden ist und zuverlässig funktioniert. Plotter die beispielsweise mit Navionics Karten arbeiten könnten das auch machen, das habe ich aber bisher nicht getestet. Vielleicht kann die Navionics App für iPad und Android das auch? Navionics Karten enthalten jedenfalls alle Daten, um so eine Prüfung möglich zu machen.
Wichtig zu wissen: Mit C-MAP Karten funktioniert diese automatische Prüfung auf Hindernisse nicht!
Grundsätzlich ist C-Map auch ein Vektor-Kartenformat, aber C-Map erlaubt es für Navigationsprogramme wohl nicht, in einer Weise auf die Daten zuzugreifen so dass eine Prüfung auf Hindernisse durchgeführt werden kann.
Insgesamt finde ich die automatische Hindernisprüfung sehr praktisch, gerade auf langen Schlägen und in den Schären, wo man doch mal etwas mit den eigenen Augen übersehen kann.
Anmerkung: Für meine Artikel und Produktempfehlungen werde ich vom Hersteller nicht honoriert. Ich schreibe grundsätzlich nur über das, was mir gefällt ohne jegliche Verpflichtung gegenüber Dritten.
Hallo Julian,
das sieht gut aus. Inzwischen gibt es diese Prüfungen auch mit C-Map Karten auf den TimeZero Navigator v3 Anwendungen (Nobeltec und MaxSea). Man kann schon bei der Routenplanung einstellen, dass eine Route mit Hindernissen nicht aktiviert wird oder bei der Fahrt wird laufend grüner und roter Bereich angezeigt. Die Berücksichtigung von Tonnen habe ich allerdings nicht finden können ansonsten sind verschiedene Einstellungen der Suchparameter möglich. Hier ein Video
https://www.youtube.com/watch?v=lxSJtxobfx4.
Mike
Moin, danke für die Info! Die GUI von TimeZero V3 finde ich viel besser als bisher, weniger verspielt, klarer und nun auch für Touchscreens – da haben die sich wohl von CoastalExplorer inspirieren lassen :))
Die Routenplanung und die Live-Hindernis-Überwachung gefallen wir sehr gut. Das ist noch schöner als bei CE.
Schade aber, dass TZ auf ein Kartenformat festgelegt ist, zumindest in der Ostsee habe ich C-Map als die schlechtesten Karten erlebt.