(Dies ist ein Teil der Artikelreihe MFD, Plotter, Instrumente, Netzwerke auf dem Boot – eine Entscheidungshilfe.)
In dem vorherigen Artikel habe ich den veralteten und doch aktuellen Standard „NMEA0183“ zum Austausch von Navigationsdaten beschrieben (hier klicken um den Artikel noch einmal zu lesen!).
Zur Erinnerung: „NMEA“ ist eine Organisation, die Standards für die Übertragung von Daten im Marinebereich erarbeitet. „NMEA0183“ ist der erste weit verbreitete Standard und stammt aus den 80ern, findet sich aber auch heute noch an vielen Ecken und Enden.
NMEA0183 hat aber eine Reihe von Nachteilen:
- Mehrere Empfänger an einem Sender gehen nicht ohne weiteres.
- Viele Kabel notwendig (von jedem Sender zu jedem Empfänger einzeln).
- Langsame Datenübertragung, beschränkt auf elementare Navigationsdaten (Position, Wind, Tiefe…), heute wünschenswerte Daten (Motor, Temperatur, Druck) können nicht übertragen werden.
Der Nachfolger von NMEA0183 löst viele Probleme: NMEA2000
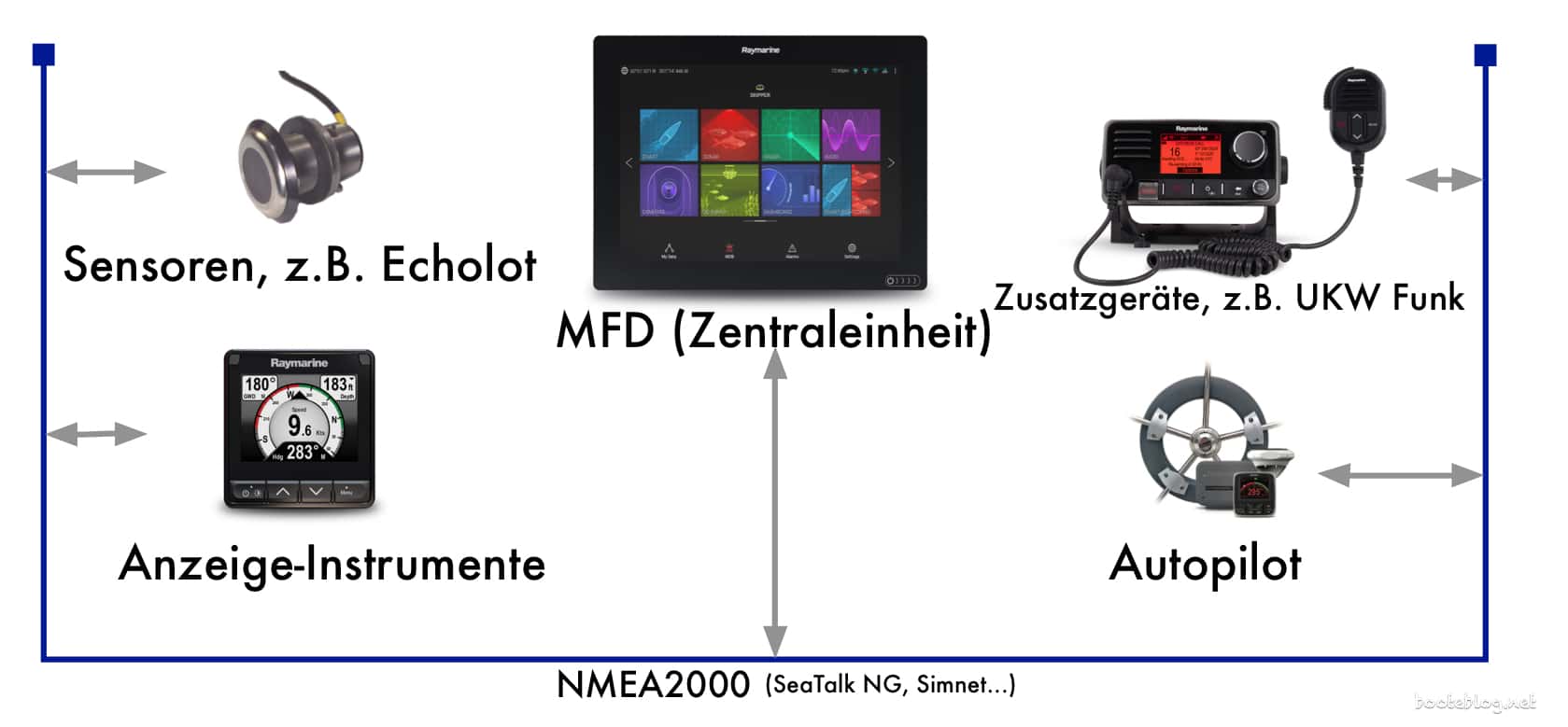
Die National Marine Electronics Association hatte all diese Nachteile auch erkannt. In der Zwischenzeit war Netzwerktechnik bei Computern und auch im Fahrzeugbau aufgekommen, und diese Art von Datenaustausch wurde von NMEA auch für den Marinebereich übernommen: NMEA2000 (abgekürzt: N2K, „K“ für „Kilo“, also „Tausend“) wurde ein solches Netzwerksystem.
Das Grundprinzip ist: Es führt genau ein zentrales Kabel durch das Schiff, das „Rückrad“ (englisch: „Backbone“, wird auch als „Bus“ bezeichnet).
Dieses Rückrad (Backbone) wird an einigen Stellen unterbrochen, um Abzweigungen zu den Geräten zu legen. So eine Abzweigung heißt „Stichleitung“ (english: „Spur“).
Ein gut ausgebautes NMEA2000 Netz kann so aussehen:

Praktischerweise werden über das Backbone-Kabel nicht nur Daten, sondern auch eine Stromversorgung (12V) transportiert. Geräte, die wenig Strom benötigen (GPS, Fluxgate Kompass, Windmesser…) können damit ausreichend versorgt werden. Aufwändigere Komponenten wie ein MFD oder Autopilot brauchen dagegen eine eigene Stromversorgung.
Keine Konfiguration. Jeder kann mit Jedem.
Ein N2K Netz funktioniert vollautomatisch. Jedes Gerät kann Daten auf das Backbone senden und vom Backbone lesen. Technisch ist das viel aufwändiger als bei dem alten NMEA0183 – aber das muss den Anwender nicht interessieren.
Wichtig ist nur: Es funktioniert. Mit viel weniger Kabeln und viel weniger Aufwand. Jedenfalls, wenn man die Grenzen des Systems kennt und einhält.
Ein klein wenig Planung und Überlegung ist doch notwendig.
Also alles ganz einfach? Ein Backbone-Kabel durch das Schiff legen, hier und dort unterbrechen, Spur Kabel legen, dort Geräte anschließen und fertig?
Im Prinzip: ja. Aber: Wie so oft steckt die Tücke im Detail.
Vor allem muss gut geplant werden, wo das Backbone-Kabel für die Spur-Leitungen unterbrochen werden soll. Denn: nachträglich ist das nicht möglich. So ein Kabel kann nicht einfach irgendwo mit dem Seitenschneider durchgeschnitten und mit Steckern versehen werden. Dabei wären Spezifikationen hinsichtlich der Abschirmung und Qualität der Verbindung einzuhalten, was für einen Skipper, der nicht gerade Elektrotechnik studiert hat, kaum möglich ist.
Daher muss im Vorfeld überlegt werden, wo überall möglicherweise mal Geräte eingeklinkt werden sollen. Dann werden kurze Backbone-Kabel bis zu diesen Stellen verlegt und entweder miteinander verbunden oder schon mit T-Stücken versehen, an denen später mal die Spur Kabel angehängt werden.
Sind diese Trennstellen erstmal vorhanden, lassen sich dort jederzeit weitere T-Stücke einsetzen, an denen weitere Geräte in das Netz eingefügt werden können.
Grenzen und Voraussetzungen
Ist das Backbone-Kabel erst geplant und gelegt, ist die restliche Arbeit tatsächlich sehr übersichtlich:
- Der Backbone muss mit Strom versorgt werden (12V! Bei einem 24V System ist also ein Wandler notwendig. Und natürlich mit eigener Sicherung).
- Der Start- und Endpunkt des Backbones muss je mit einem „Terminator“ versehen werden. Das ist einfach ein „Propfen“, der auf die Enden aufgesteckt wird und eine bestimmte – und sehr wichtige! – elektrotechnische Funktion erfüllt.
- Eine Stichleitung darf nicht beliebig lang sein (bei Raymarine 6 Meter).
- Das Backbone-Kabel darf auch nicht beliebig lang sein… die Grenze ist hier aber sehr hoch (über 100 Meter) und reicht für Yachten locker aus.
- Bei Backbone-Kabeln über ungefähr 50 Meter spielt es eine Rolle, an welchem Punkt die Stromversorgung eingespeist wird. Doch auf welcher Yacht wird diese Länge erreicht? Daher kann in der Regel die Stromversorgung auch am Anfang oder Ende des Backbones stattfinden.
Ein NMEA2000 Netz überträgt Daten mit einer fest eingestellten Geschwindigkeit von 250.000 Bits pro Sekunde (es werde nicht nur einfache Zeichen übertragen, der Begriff „Baud“, den ich im vorigen Artikel erklärt hatte, passt hier daher nicht). Das ist ungefähr 50 mal so schnell als bei dem alten NMEA0183 Standard. Und vor allem: ausreichend schnell für alle einfach strukturierten Navigationsdaten.
Aufwändigere Anwendungen wie Radar oder Videokameras können allerdings nicht über das N2K Netz übertragen werden, dafür ist eine noch größere Geschwindigkeit notwendig (dazu mehr im nächsten Artikel).
Ein konkretes Beispiel für ein Backbone-Kabel
Nehmen wir eine 12m Yacht: Im vorlichen Bereich ist ein Triducer (Tiefe, Logge, Temperatur) installiert. Mittschiffs liegt die Navigation. Achterlich die Maschine und das Cockpit mit dem Steuer.
Bei der Navigation ist ein MFD und ein UKW-Funkgerät installiert. Bei der Maschine gibt es noch keine Sensoren, aber vielleicht soll da mal ein Temperatur-Sensor oder ein Adapter für Maschinendaten (Öldruck, Drehzahl etc.) installiert werden. Im Cockpit ist auf der Steuerbord Seite ein MFD, an Backbord zwei konfigurierbare Anzeige-Instrumente eingebaut. Schließlich befindet sich am Heckkorb ein GPS Sensor.
Ein passendes Backbone könnte so aussehen:
- Ein ca. 6m Kabel vom Triducer zur Navigation. Dort mehrere T-Stücke oder ein mehrfach-Verteiler, außerdem erfolgt dort die Stromversorgung des Backbone mit einem speziellen Spur-Kabel.
- Von der Navigation ein kürzeres Kabel zur Maschine. Das wird direkt mit dem nächsten Backbone-Kabel verbunden, weil dort nur eine Trennstelle für die Zukunft vorgesehen sein soll.
- Von der Maschine geht es weiter zum Cockpit nach Steuerbord. Dort wieder ein T-Stück (für das MFD), und mit einem kurzen Kabel weiter nach Backbord.
- An Backbord ein Mehrfach-Verteiler (für die beiden Anzeige-Instrumente und den GPS-Sensor).
So können alle Geräte mit kurzen Spur-Kabeln in das Backbone eingefügt werden, und das Backbone ist an allen relevanten Stellen getrennt, um zukünftig neue Geräte einhängen zu können.
Abwandlungen von NMEA2000 durch Hersteller
Wie auch schon bei NMEA0183 haben einige (nicht alle) Hersteller das N2K Netz um eigene Ideen und Standards „erweitert“. Dies bezieht sich allerdings in der Regel auf spezielle Stecker, T-Stücke und Verteiler. Damit soll die Installationsarbeit erleichtert und sicher auch die Kunden in der eigenen Welt gehalten werden.
Bei jeder mir bekannten Variation eines N2K Netzes (z.B. SeaTalk-NG bei Raymarine oder Simnet bei Simrad) kann aber problemlos durch einfache (aber teure) Adapter-Kabel ein Übergang zu dem eigentlichen N2K-Standard-Kabeln mit „Micro-C“-Steckern geschaffen werden. So kann jedes N2K-fähige Gerät eines Drittherstellers in das eigene Netz integriert werden.
Zusammengefasst
- NMEA2000 (abgekürzt „N2K“) ist der aktuelle Standard zur Übertragung von einfach strukturierten Daten (Navigation, Maschine…).
- Ein N2K Netz besteht aus einem zentralen Backbone, in das Spur-Kabel mittels T-Stück oder Verteiler eingeklinkt werden.
- Geräte werden an die Spur-Kabel angeschlossen.
- Das Backbone muss vorausschauend geplant werden. Spätere Unterbrechungen sind nicht möglich, ohne Backbone-Kabel zu tauschen.
- Das Backbone muss am Anfang und am Ende mit einem Terminator abgeschlossen werden.
- Das Backbone wird mit 12V Strom versorgt (nicht 24V).
- Die Stromversorgung im N2K Netz reicht für kleine Geräte wie einen GPS Sensor, nicht aber für komplexe Anwendungen wie ein MFD.
Mögliche Probleme und Lösungen im Umgang mit NMEA2000 Daten
Stand: 21. März 2017. Diese Tabelle werde ich bei Bedarf erweitern.
| Problem | Mögliche Lösung |
|---|---|
| Geräte, die am NMEA2000 Netz hängen, funktionieren nicht. | Ist das Backbone mit 12V Strom versorgt? Bei sehr langem Backbone-Kabel (50m) sollte die Stromversorgung mittig im Backbone erfolgen. |
| Geräte scheinen zu funktionieren (z.B. leuchten LEDs), es werden aber keine Daten übertragen. | Prüfen, ob das Backbone korrekt am Anfang und Ende mit Terminatoren abgeschlossen ist. Das Backbone darf keine offenen Enden haben. |
| NMEA2000 Daten sollen an einen Computer gesendet werden. | Hier gibt es zwei Varianten:
a) Wandlung in das NMEA0183 Format, dann senden an den Computer Viele Programme verstehen nur Daten im NMEA0183 Format. Dann hilft z.B. der Actisense NGW-1-USB. b) Direkte Übertragung der NMEA2000 Daten an den Computer. Wenn das auf dem Computer genutzte Programm tatsächlich direkt NMEA2000 Daten versteht, kann z.B. mit einem Actisense NGT-1 oder Maretron USB100 gearbeitet werden. |
Beratung. Bitte stelle Fragen als Kommentar unter den Artikel. So haben alle Leser etwas davon.
Vielleicht noch erwähnenswert, dass zwar alle N2K-Geräte miteinander kommunizieren können und die Daten der jeweils anderen Geräte lesen/sehen. Aber dennoch benutzt fast jeder Hersteller zusätzlich ein eigenes Protokoll, um herstellerspezifische Geräte (insbesondere Autopiloten) zu steuern. Beispiel: Ein MFD von B&G steuert nur Autopiloten von B&G, nicht aber einen Raymarine Evo, obwohl beide miteinander Daten austauschen und die Daten des jeweils anderen Gerätes sichtbar sind.
Ja, das stimmt! Während es bei NMEA0183 nur definierte Datensätze gab, können über N2K auch eigene Daten übertragen werden.
Mal wieder sehr interessant, allerdings habe ich noch ein paar grundsätzliche Verständnisprobleme. Das genannte System dient also zum Austausch von NAV-Daten, soweit so gut. Wie sieht es aber aus, wenn ich das System in ein Elektrisches Bus-System integrieren möchte? Dieses läuft ja auch auf der Grundlage von N2K. Brauche ich dann immer noch die genannte Verschaltung (Backbone, etc..) zusätzlich zu dem Bussystem mit seinen Knoten? Ich stelle mir das dann so vor: Es gibt das Bus-system (z.B.: ETA Powerplex oder Gröning) und dieses versorgt einige selektierte Großverbraucher (z.B. Autopilot) mit Strom, mehr aber nicht. Sämtlicher Datenverkehr geht dann über das N2K NAV Netz (so wie oben beschrieben). Auch die Überwachung der and das NAV Netz angeschlossenen Komponenten erfolgt NICHT über das Bus-System, sondern über das N2K NAV Netz. So würde mir ein Ausfall des Radarmotors dann auch auf letzterem angezeigt. Ist das so korrekt?
Mit anderen Bus-Systemen habe ich mich nicht beschäftigt und kann dazu nichts sagen.
Aber: Maretron stellt N2K Komponenten zur elektrischen Überwachung her, guck mal hier: http://www.maretron.com/products/electricalMonitoringAndControl.php
Eine Komponente, die einen Übergang vom Navigations-Bus zu einem anderen Bus realisiert ist mir nicht bekannt – aber wie gesagt, das will nichts heißen 🙂
Der Grund für meine Frage ist folgender: Du arbeitest bei dem von Dir vorgestellten Konzept mit T-Stücken, die vorher ganz genau geplant werden müssen. Hat man ein elektrisches Bus-System, so kann man für die Ansteuerung, Messung und Spannungsversorgung mit Knoten arbeiten. Diese Schalten bis zu 50 verschiedene Verbraucher, überwachen diese und versorgen sie mit Strom. Die dazugehörige Datenleitung funktioniert auf Grundlage von N2K. Mir schwebt folgendes System vor: MFD oder Plotter im Cockpit. Karte, Radar, AIS in einem Bild. Bei Bedarf umschalten auf Elektrikdisplay. Schaltung aller Lichter (Innen- sowie außen) vom Display möglich. Umschaltung auf Überwachungsdisplay mit Angabe Tankfüllstand, Motortemperatur und Stellung Seeventile. Sollte man vergessen haben, das Licht in der Bugkabine auszuschalten: Ein Tastendruck im Cockpit genügt. Danach z.B. Umschalten auf Instrumentendaten für Wind, Logge, etc…
Hier ein Beispiel eines Knotens
https://www.e-t-a.com/fileadmin/user_upload/Ordnerstruktur/Images/Product_Images/Elektromechanik/PowerPlex/PowerPlex_Module.png
Und hier ein Beispiel eines Cockpit-MFD:
https://www.boening.com/uploads/pics/AHD_1110_G.png
https://www.boening.com/uploads/pics/manufacturer_01.jpg
Ich weiß, dass aktuelle Raymarine MFDs Verbraucher schalten können – habe mich aber bisher nicht dafür interessiert, wie das umgesetzt wird. Schau doch mal in die Doku zum aktuellen Lighthouse Betriebssystem – müsste auf der Raymarine Website zu finden sein.
Überwachung von Motordaten und Füllständen geht mit den MFDs sowieso, das ist im N2K System ja auch vorgesehen.
Hallo Julian,
vielen Dank für Deine schnelle Antwort. Ich habe ja bereits das NMEA 2000 System an Bord. Ich werde mir also nur den Konverter vom NMEA 2000 zum USB Eingang kaufen und dann sollte das mit dem JPS ja klappen.
M. s. G. Thomas
Moin Julian,
auf der Suche nach Info´s über NMEA 2000 bin auf deine Seite gestoßen. Das ist ja echt ein großer Erfahrungsschatz den du hier Preis gibst und schön gemacht, alle Achtung!
Nun zu meiner Frage: Ich möchte mein Notebook als Kartenplotter benutzen. Für mein Funkgerät, ein Link 8, habe ich bereits eine NMEA Verbindung zu einer GPS- Antenne. Kann ich diese Antenne über die Schnittstelle auch parallel für das Notebook benutzen oder muss ich dafür eine zweite GPS- Maus haben?
M. s. G. Thomas
Hallo Thomas,
ein NMEA0183 Sender kann in der Regel mehrere Abnehmer betreiben. D.h. wenn Du ein NMEA0813-USB Wandler hast (z.B. Actisense USG-2 oder der ältere USG-1) müsstest du die NMEA Kabel von der GPS Antenne parallel an Funkgerät und USB-Wandler anschließen können.
Wenn das wider erwarten nicht funktionieren sollte musst du einen Multiplexer dazuzwischenhängen .
Oder: Wenn du planst, weitere Geräte zu vernetzen, könntest du einen NEMA0183-NMEA2000 Wandler und dann einen NMEA2000-USB Wandler installieren. Zukünftig müsstest du dann weitere Geräte (z.B. Plotter, Echolot…) nur noch in das NMEA2000 Netz hängen und hättest die Daten dann sofort auf dem Notebook (oder anderen Navigationsgeräten). Die Anfangsinvestition dieser Variante ist höher, aber besser für die Zukunft gerüstet.
Hallo Julian,
Tolle Seite hier!
Ich möchte meinen Raymarine a95 Plotter mit einem ais-transponder camino-108 von amec verbinden ( da das IC-423M Funkgerät einen eigenen GPS-Empfänger hat, kann ich keinen Vorteil darin erkennen, auch das Funkgerät mit den beiden zu verbinden).
Jetzt zu meiner Frage:
Beide, Plotter und AIS, sind sowohl NMEA 0183- als auch NMEA 2000- fähig.
Die beiden Geräte wurden sehr nah beieinander platziert, sodass rein kabeltechnisch die 0183 Verbindung sicher einfacher zu bewerkstelligen ist (keine Stromversorgung für das Backbone). Log und Sonar sind mit eigener Anzeige verkabelt und funktionieren gut. Eine Verbindung mit dem Plotter ist deshalb nicht vorgesehen.
Eigentlich erscheint mir somit eine 0183-Verkabelung einfacher und ausreichend. Gibt es aus deiner Sicht trotzdem Vorteile, wenn ich auch nur für diese beiden Geräte eine 2000er Verbindung installiere?
DANKE für deine Hilfe!
LG, Saint Ex
Hi, das geht grundsätzlich auch mit der NMEA0183 Variante im HighSpeed Modus. Du könntest aber in vielbefahrenen Gewässern in das Problem laufen, dass NMEA0183 schlicht nicht schnell genug ist. Auf der sicheren Seite bist du mit N2K.
Hallo Julian , vielen dank das du hier dein Wissen teilst.
Ich habe zur Zeit ein Thema NMEA BUS .
Und zwar geht es um Gewässerkartierung, wir haben eine Sonar Antenne und eine GPS Antenne am NMEA2000 Bus hängen ,und zur live Auswertung das Programm Reefmaster ,dieses kann wohl NMEA 0183 .
Das Programm kann die Daten über einen virtuellen Com Port emfpangen wenn es die Daten über ein Kombi-Gerät Sonar/Gps per NMEA 0183 bekommt .
Wenn ich in unserem Fall als USB Adapter den Actisense NGX-1 nehme, würde der Adapter ja NMEA 2000 zu NMEA 0183 übersetzen …….würde das dann für unser Programm aussehen wie ein Gerät das beide Datensätze sendet ?
Gruß Peter
Hallo Peter,
ja, ich denke schon. Es gibt ja kein „kombiniertes“ GPS/Sonar Gerät – das sind immer getrennte Geräte. Wichtig ist nur, dass die jeweiligen Datensätze über den Bus gehen.